Is this my body? (Part II)
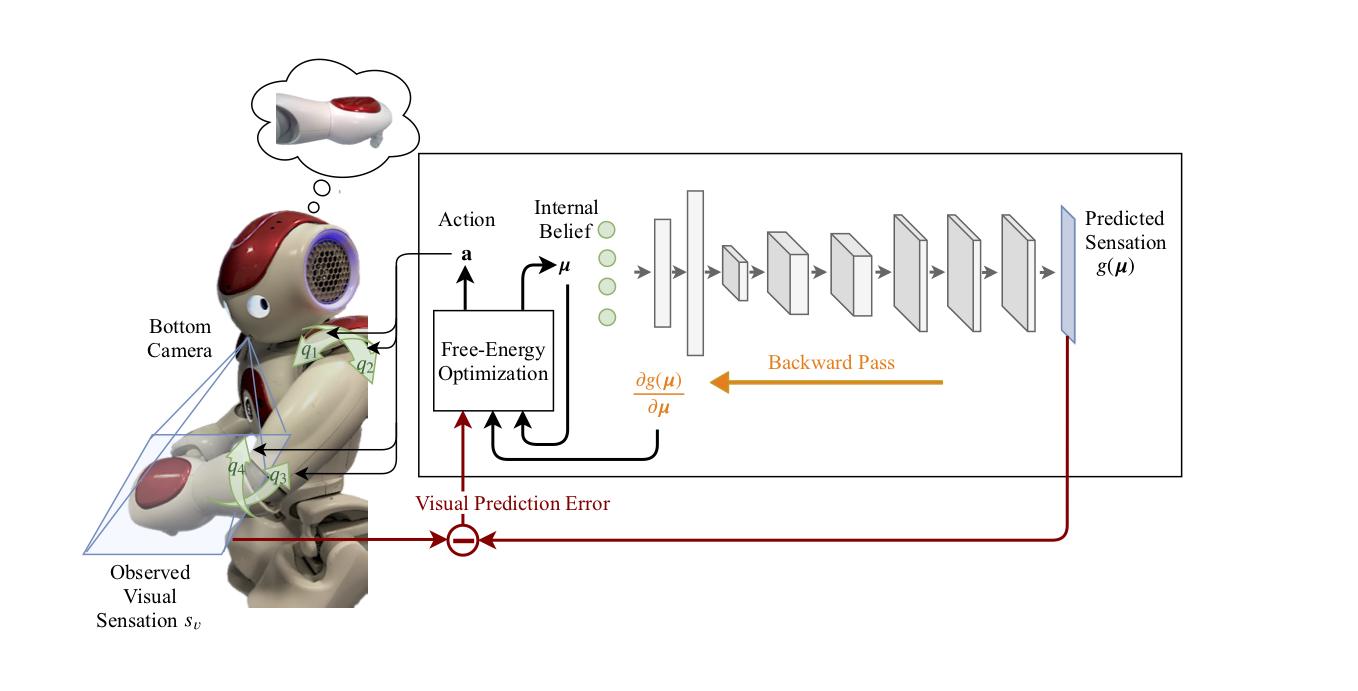
In our previous post Part I, the free-energy principle (FEP) was introduced and deployed into a humanoid robot. However, all functions and models were known....
In our previous post Part I, the free-energy principle (FEP) was introduced and deployed into a humanoid robot. However, all functions and models were known....
We wake up every morning and we look in the mirror and… yes, that reflexion is you. How do we know it? How do we know where our body parts are in space or th...
Visual object tracking is an important tasks for robot applications. With THOR, we can improve several state-of-the-art trackers without any training.
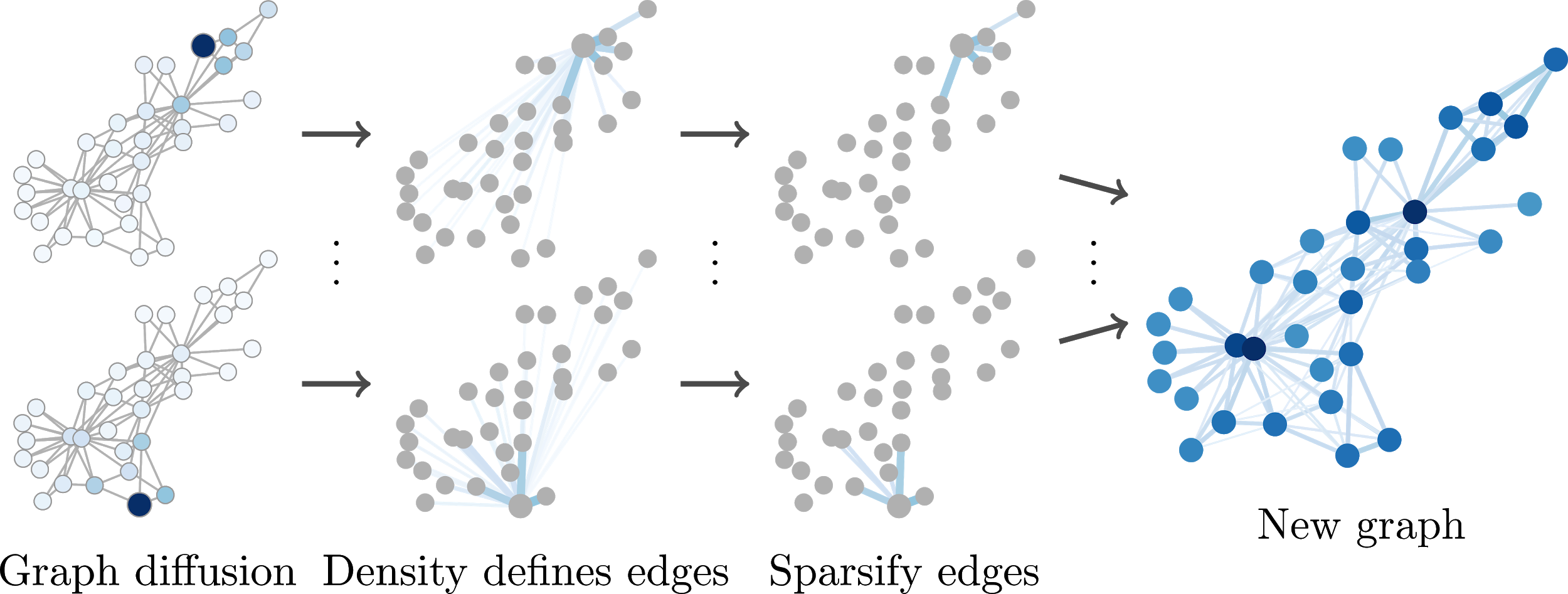
Graph Diffusion Convolution (GDC) leverages diffused neighborhoods to consistently improve a wide range of Graph Neural Networks and other graph-based models.
In our previous post Part I, the free-energy principle (FEP) was introduced and deployed into a humanoid robot. However, all functions and models were known....
We wake up every morning and we look in the mirror and… yes, that reflexion is you. How do we know it? How do we know where our body parts are in space or th...
We are excited to launch the “Munich School of Robotics and Machine Intelligence” blog! We want to use this outlet to write about our research done at the in...
Graph Diffusion Convolution (GDC) leverages diffused neighborhoods to consistently improve a wide range of Graph Neural Networks and other graph-based models.
Visual object tracking is an important tasks for robot applications. With THOR, we can improve several state-of-the-art trackers without any training.
Visual object tracking is an important tasks for robot applications. With THOR, we can improve several state-of-the-art trackers without any training.